控制器局域网 局域网远程控制软件
时间:2023-03-20人气:作者:佚名
控制器局域网的概念
控制器局域网是国际上应用最广泛的现场总线之一。CAN被设计作为汽车环境中的微控制器通讯,在车载各电子控制装置ECU之间交换信息,形成汽车电子控制网络。比如:发动机管理系统、变速箱控制器、仪表装备、电子主干系统中,均嵌入CAN控制装置。 一个由CAN 总线构成的单一网络中,理论上可以挂接无数个节点。实际应用中,节点数目受网络硬件的电气特性所限制。例如,当使用Philips P82C250作为CAN收发器时,同一网络中允许挂接110个节点。CAN 可提供高达1Mbit/s的数据传输速率,这使实时控制变得非常容易。另外,硬件的错误检定特性也增强了CAN的抗电磁干扰能力。
控制器局域网(CAN)标准不断发展,正用于车载和工业网络之外的许多新应用。支持它的微处理器变得普遍且价格低廉,并且开源协议栈让其非常容易访问,同时也容易添加至新系统。有许多CAN板可用于BeagleBone (Capes)、Stellaris® (BoosterPacks)、Arduino (Shields)和其他微处理器开发平台。当设计人员的系统上电却不能工作时,应该怎么办呢?本文为您介绍一种对CAN物理层进行调试的较好工程方法。我们将介绍基础调试步骤,并说明一个CAN物理层应有的性能,以及找出问题的一些小技巧。
调试基础知识
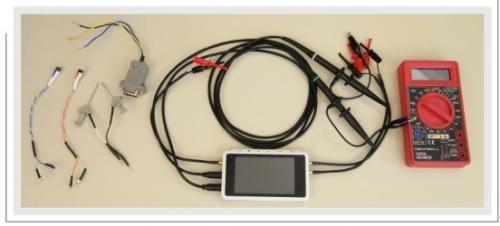
ISO11898-2和ISO11898-5规范详细说明了高速CAN物理层即收发器。掌握CAN物理层的基础知识以后,利用简单的调试工具便可迅速地找出常见问题。所需的基本实验室工具为示波镜、数字万用表(DMM)和一个电源。如果想要深入了解问题,则需要更高精度和更复杂的工具。这种问题已非本文讨论的范畴,但是这里介绍的基础知识可帮助确定问题所属类别,以及进一步调试所需的其他工具。一个由 TI 组装的CAN演示系统以及TI的SN65NVD255D评估模块(EVM)1,用于演示硬件。另外,我们还使用了其他一些东西,例如:CAN连接器外接头电缆和芯片钩(抓住收发器引脚,让其连接至电缆,以更加容易地连接示波器指针,如图1所示)。
图1 CAN物理层调试基本工具
连接检查
开始调试对话时,使用DMM确认印刷电路板(PCB)上连接如我们所预计的那样—系统未上电。这看似很基础,但令人吃惊的是,这个简单的方法却解决了许多简单问题。所有人都会认为原理图、布局和制造工艺没有问题,但不幸的是,它们有时却并不如人愿。子插件板位置错误、虚焊和错误端接或者连接的电缆,都是一些常见问题。利用DMM电阻设置来确认所有线路和连接均正确。图2所示CAN应用的简易原理图用作参考。
图2 CAN应用简易原理图
物理层调试的基础知识和实例分析")
表1列举了需要检查的PCB和网络连接。收发器引脚和PCB上其他相关连接之间的电阻应为0Ω,除非设计使用表注里介绍的一些选项。例如,限流串联电阻器、总线端接电阻器或者数字I/O的上拉或下拉电阻器。
表1 PCB和CAN收发器连接总结
物理层调试的基础知识和实例分析")
总线端接检查
大多数CAN标准均规定使用一条单双绞线(有或者无屏蔽层),其特性阻抗(Z0)为120Ω。应使用与线路特性阻抗相同的电阻器来端接电缆两端,以防止信号反射。端接可以为电缆上总线端的单120Ω电阻器,如图3中CAN总线左侧所示;或者,它也可以位于某个端接节点内,如图3右侧所示。不得将端接电阻从总线移除。如果CAN端接电阻负载不存在,则信号完整性会受到影响,并且无法满足比特计时要求。如果总线共模电压滤波和稳压理想,则使用分裂端接,如图2所示。在该图中,每个电阻器均为60Ω,而分裂电容器范围为1 nF到100 nF,具体取决于共模滤波器所需的频率。2CANH到CANL的测得电阻应介于45Ω到65Ω之间,以达到CAN标准、两个端接电阻器的并联阻抗以及并联节点输入电阻的容差。应根据可能碰到的极端故障状态(通常为系统接地的电源电压)来确定端接电阻器的额定功率。
图3 典型CAN总线
物理层调试的基础知识和实例分析")
电源检查
在系统上电以前,应首先检查CAN收发器的一个或者多个电源。根据所使用的收发器类型,VCC应为3.3V或者5V。不管您相不相信,在一些情况下,丢失VCC确实为问题的根本原因。因此,我们应确保VCC存在于收发器的VCC引脚上。只需检查DMM,便可确认有电源存在。必须注意电源短路接地(不幸的是,该引脚就在VCC引脚的旁边)。
显性状态(60Ω总线负载时约为60mA)和隐性状态(10mA)之间所需电流(ICC)差约为50mA。显性总线状态期间端接电阻差分电压的产生需要这50mA的电流差,并且其随总线负载变化而变化。DMM还可用在电流模式下,以验证预计ICC电源电流。由于CAN的开关性质,DMM测得的电流伪平均读取值。
建议本地旁路电容器至少应为4.7µF,以确保总线状态转换期间有足够的电源缓冲。否则,收发器的突入电流可能会引起明显的电压电源纹波。我们可以使用一个示波器来验证电源电压是稳定,还是随着总线状态变化而变化。转换期间,最好不要让收发器“饥饿”。收发器受到其限流的保护,但是,当收发器试图驱动总线至显性状态时,如果其中一条总线短路至电源或者接地,则电源电流极高。如果电压调节器无法提供这么多的电流,则电压电平降至收发器规格范围以下,甚至可能会低至触发收发器的欠压锁定状态。
CAN物理层基础知识
一旦完成所有基础检查,就可以检查CAN物理层的核心CAN总线了。收发器的两个关键组件便是接收器和发射器。发射器被称作CAN的驱动器。通过VCC/2共模点(约2.5V)对CAN物理层偏置,见图4。
图4 简易CAN总线收发器
物理层调试的基础知识和实例分析")
发收器将单端数字逻辑信号、TXD(或者D)和RXD(或者R)转换为差分CAN总线所要求的电平。当总线为显性时,在接收节点,其CAN标准定义的差分电压(Vdiff(D))大于1.2V,并且处于逻辑低状态。当总线为隐性时,在接收节点,其CAN标准定义的差分电压(Vdiff(R))为-120mV≤(Vdiff(R))≤ 12 mV,并且处于逻辑高状态。两种总线状态均通过收发器内共模网络偏置。图5显示了典型的总线层级。
图5 CAN总线状态
物理层调试的基础知识和实例分析")
对总线进行调试时,最为有用的工具之一便是示波器。尽管单通道示波器便可看到信号,但最好还是用双或者四通道。理想情况下,可同时看到TXD、RXD、CANH和CANL,以确保收发器和总线性能如预期。进行初次调试时,只需一个低带宽示波器,因为标准CAN被限定在1Mbps。(在不远的将来,在引入拥有灵活数据速率的CAN以后,这种情况将有所改变。)如果该节点正发送数据比特流,则可在TXD输入端看到输入数据。差分CAN总线引脚(CANH/CANL)存在传输延迟,同时还存在RXD输出传输延迟。在CAN中,这些延迟均为循环时间,或者说循环延迟。如果该节点正在接收,则TXD闲置;但是总线和RXD输出会显示CAN帧。
为了演示基础CAN总线工作情况,图6显示了一个示波器,它拥有两个模拟通道和两个数字通道,以及一个函数生成器。CAN总线由两个SN65HVD255D EVM组成,每个在总线上的端接电阻均为120Ω。示波器函数生成器连接至顶部EVM的TXD输入引脚。图7中,数字通道1显示了CANH信号(蓝色);模拟通道2显示了CANL信号(黄色);数字通道2显示了RXD信号(绿色)。尽管该示波器的精确度很低,但这个简单的测试表明,该CAN物理层的表现在总体上符合我们的预期。
图6 两个EVM的CAN总线调试
物理层调试的基础知识和实例分析")
图7 TI CAN EVM信号
物理层调试的基础知识和实例分析")
图8显示了该示波器和用于调试TI CAN演示系统的探针装置。该节点使用菊形链,并使用CANopen® D-SUB 9针连接器。一个总线外接头连接器位于图8左上方。利用它,我们可以轻松地连接模拟示波器探针至CAN总线的CANH和CANL引脚以及GND。由于探针过大,无法抓住中间CAN节点的TXD和RXD IC引脚,因此可通过连接至探针的芯片钩和一小段电缆,将这些引脚连接至示波器的数字通道。另一种方法是,给每个收发器焊接一小段线,这样示波器探针便可更容易地连接。
图8 TI CAN演示系统调试
物理层调试的基础知识和实例分析")
图9显示了示波器获得的CAN信号详细情况。尽管这些信号的分辨率和精度均不高,但它们可以帮助确定需要了解CAN节点工作的那些信息。中间节点的TXD触发了示波器;CANH和CANL信号差异符合预期;在CAN构架端可清楚地看到高差分电压的收到确认(ACK)位。该高压为同时并行产生ACK位的多个CAN节点的结果。轻松找出ACK位的另一个方法是其存在于RXD信号中而非TXD信号中,这意味着它由另一些节点产生。
图9 TI CAN演示系统的信号
物理层调试的基础知识和实例分析")
CAN调试例子
图10显示了一个CAN演示系统,在PCB右边,连接至菊形链输出的CANH线路被损坏。出现这种情况的原因是,系统后面的一个固定螺栓摩擦PCB,而在几年的时间里该系统被运输至世界各地。当系统通过菊形链总线接口连接至其他CAN节点时,便故障无法工作。
图10 带有损坏CANH线路的CAN演示系统
物理层调试的基础知识和实例分析")
图11所示CANH信号表明了该损坏PCB线路的效果。另外,DMM连续性检查也可证实该开路。
图11 PCB上CANH线路遭损坏的TI CAN信号
物理层调试的基础知识和实例分析")
图11还突出详细显示了CAN帧的另一个重要部分,即ACK位。示波器使用单一模式,在某个单比特发现触发器时,其在右手节点的TXD引脚上被触发。该单比特为这一节点产生的ACK位,目的是确认接收到一个有效的CAN帧。所有接收节点确认收到发送节点的CAN帧。相比在TXD上看到的发送ACK位,总线上所看到的ACK位的位时间稍长。这是同时发送ACK位的多个节点的假象。影响这种长位时间的一些因素包括:通过线缆的5ns/m延迟、三个CAN节点之间的时钟计时漂移以及同时发送一个ACK位的两个节点所产生的高差分电压。如果这些因素使ACK位(空档)变得更长,并在ACK分隔符内保持显性,则其可能引起CAN误差帧。
CAN总线调试的另一个例子是,在某个系统中,只有非常慢的CAN数据速率(比特计时)才会起作用。把一个示波器连接至TXD引脚,在TXD输入端显示出非常慢的上升时间,如图12所示。1Mbps的CAN数据速率下,9.6µs计时延迟相当于10比特。它的根本原因是:我们正使用一个具有开路漏极的微处理器来驱动收发器的TXD引脚。在这种情况下,没有真正的逻辑高电平驱动。仅有CAN收发器的弱内部上拉正驱动TXD引脚高,因此它的RC时间常量非常长。通过在TXD引脚上添加一个上拉电阻器,便可轻松解决这个问题。
图12 TXD引脚上慢上升时间例子
物理层调试的基础知识和实例分析")
以上就是本文介绍的用实际例子分析CAN物理层基础和调试的全过程,有图文解说应该很容易理解了哦,设计人员应该可以马上让其CAN系统正常运行了。谢谢阅读。希望能帮到大家。
最新文章

打造万能Windows封装包 对于那些经常需要给朋友攒机或者重新安装操作系统的电脑高手来说,每次安装Windows系统所经历的漫长等待无异于一次折磨。虽然身边有
(365)人喜欢2024-10-07
修改注册表加快Windows 7关机速度 关机更迅速,操作简单方便,何乐而不为呢! 在Windows7系统的“开始”菜单的搜索框中输入“regedit”打开注册
(352)人喜欢2024-10-07
windows关闭默认共享 一、运行–CMD–net share 会显示你的电脑的共享情况 二、如果有些没有关闭:net share c$ /d net sha
(366)人喜欢2024-10-07
windows安装redis缓存使用图文教程 下载安装 通过https://github.com/mythz/redis-windows这里可以直接下载,然后解
(368)人喜欢2024-10-07




-
打造万能Windows封装包 对于那些经常需要给朋友攒机或者重新安装操作系统的电脑高手来说,每次安装Windows系统所经历的漫长等待无异于一次折磨。虽然身边有
(365)人喜欢2024-10-07 -
修改注册表加快Windows 7关机速度 关机更迅速,操作简单方便,何乐而不为呢! 在Windows7系统的“开始”菜单的搜索框中输入“regedit”打开注册
(352)人喜欢2024-10-07 -
windows关闭默认共享 一、运行–CMD–net share 会显示你的电脑的共享情况 二、如果有些没有关闭:net share c$ /d net sha
(366)人喜欢2024-10-07 -
windows安装redis缓存使用图文教程 下载安装 通过https://github.com/mythz/redis-windows这里可以直接下载,然后解
(368)人喜欢2024-10-07